2019年2月7日(水)、「はやぶさ2」定例記者会見において、小惑星「リュウグウ」への第1回タッチダウンが、同年2月22日(金)午前8時頃に計画されていることが発表された。
東京とびもの学会はこの記者会見の取材を行った。その成果を全3回にわたってお送りする。最初はタッチダウン地点と当日の時系列、注目ポイントだ。
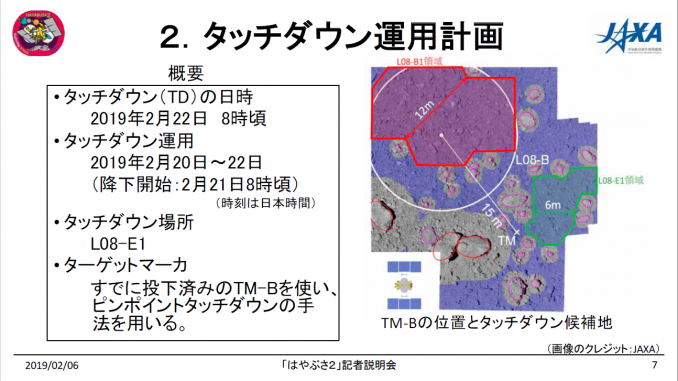
1.着陸予定地点
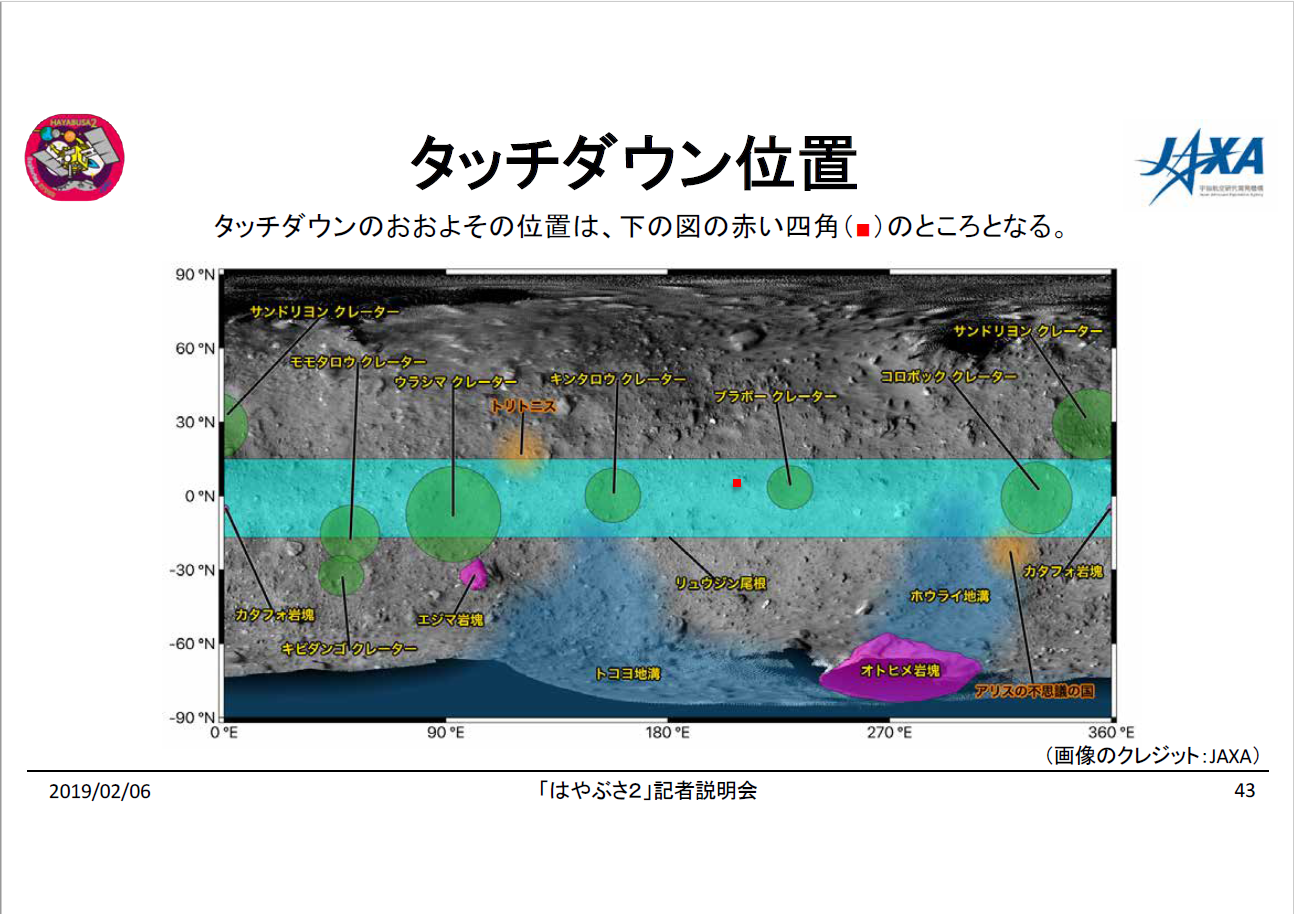
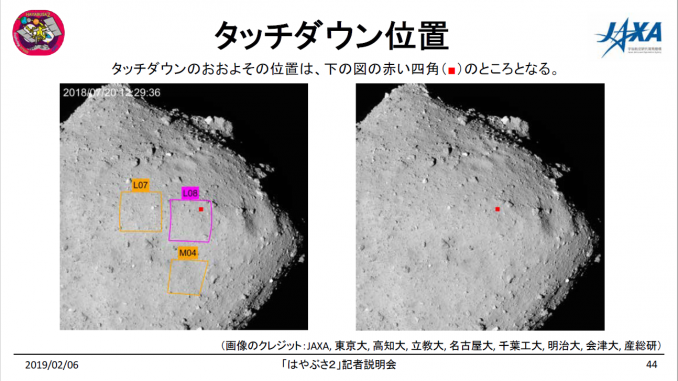
リュウグウの赤道を一周しているリュウジン尾根上、キンタロウクレータとブラボークレータの間で、ブラボークレータ寄りの位置。タッチダウン地点選定時の番号で言うならL08-E1領域となる。
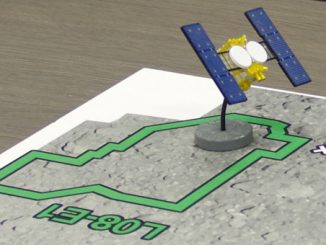
この地点内に設定された直径6mの円の中央を狙っていく。既に投下済みのターゲットマーカBを用いたピンポイントタッチダウンとなる。
2.タッチダウンの流れ
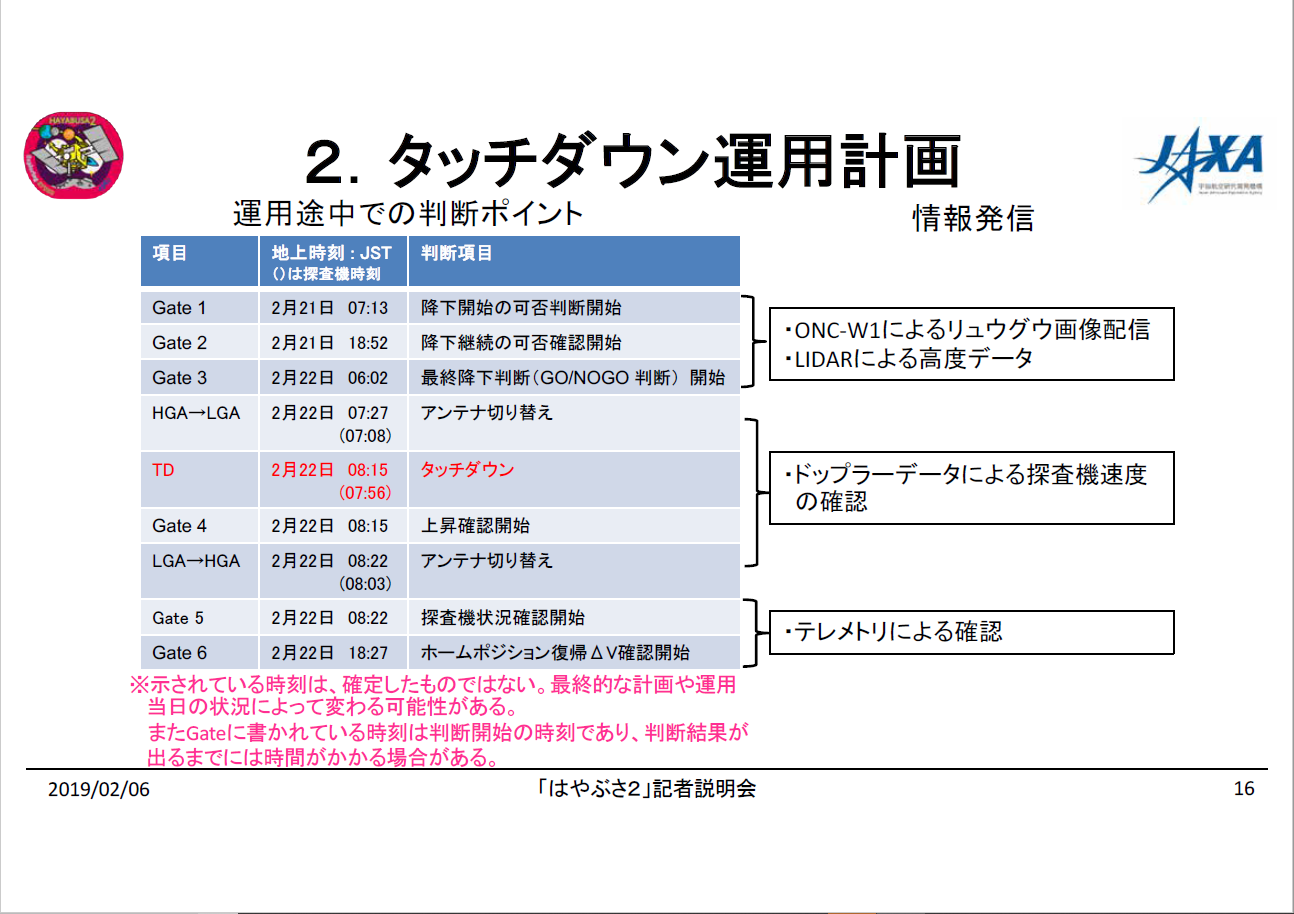
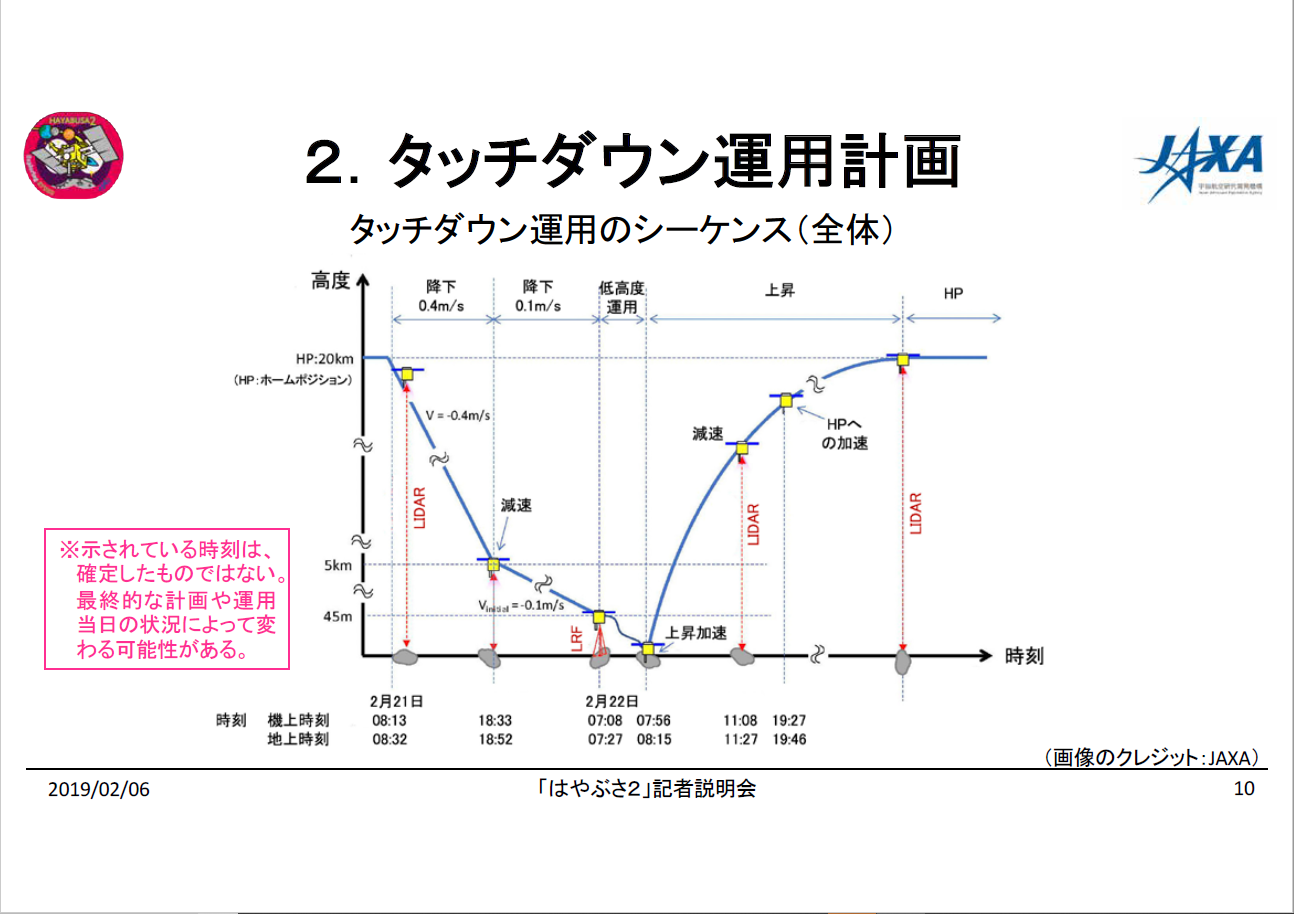
時系列に沿って記す(様々な要因で遅れる可能性もある)。時刻は全て日本標準時。
| 2019年2月21日 | |||
| 時刻 | 項目 | 高度 | 内容 |
| 07:13 | Gate1 | 20km | 降下開始の可否判断開始(人間が判断) |
| 08:13 | 降下開始(速度は毎秒40cm) | ||
| 18:33 | Gate2 | 5km | 降下継続の可否確認開始(人間が判断)
可(Go)ならば毎秒10cmに減速し降下継続 |
| 2月22日 | |||
| 06:02 | Gate3 | 500m | 最終降下判断(Go/NoGo判断)開始
Goならば最終降下開始 |
| 07:27 | HGA→LGA | 45m | アンテナ切替(ハイゲインからローゲイン)
以後、地上からの機体状況はタッチダウン終了後までドップラーシフトのみで監視 |
| 07:28 | 低高度運用 | ||
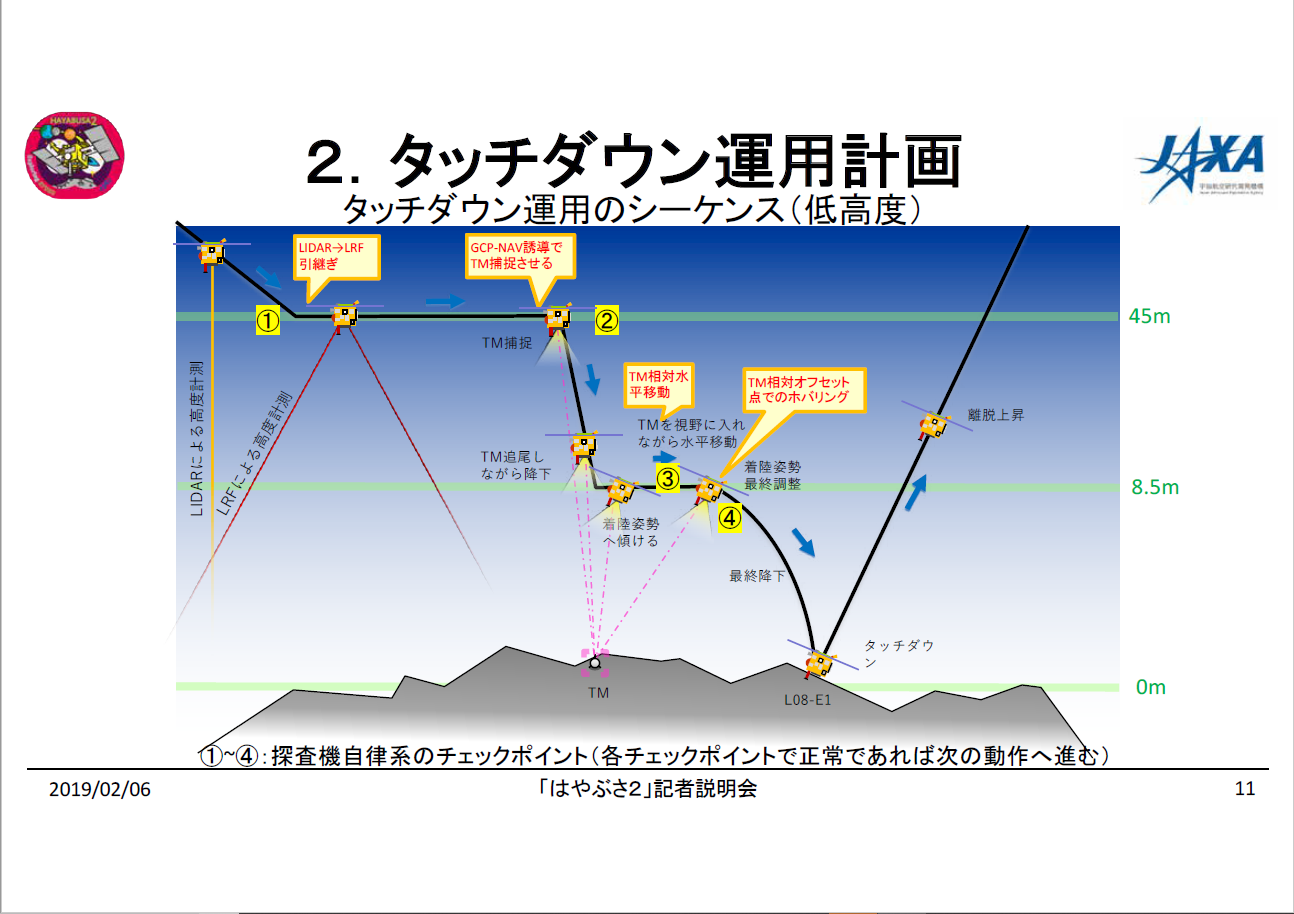
| CP1 | 高度計測をLIDERからLRFに引き継ぎ確認
以後「はやぶさ2」は自律判断で降下する |
||
| 随時 | CP2 | ターゲットマーカ捕捉確認 | |
| 随時 | ターゲットマーカを追尾しながら降下 | ||
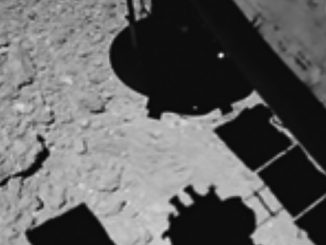
| 随時 | CP3 | 8.5m | 着陸姿勢に機体を傾ける |
| 随時 | 8.5m | 傾けたままターゲットマーカを視野に入れながら水平移動 | |
| 随時 | CP4 | 8.5m | 最終降下開始位置で機体を静止させ、振動が収束するのを待つ |
| 収束したらスラスタを一度短く軽く噴射しあとは自由落下で表面まで降下 | |||
| 08:15 | TD | 0m | タッチダウン
リュウグウ表面に接触しているのは数秒間 |
| 随時 | Gate4 | 上昇確認開始 | |
| 08:22 | LGA→HGA | アンテナ切替(ローゲインからハイゲイン) | |
| Gate5 | 探査機状況確認開始 | ||
| 11:27 | 減速開始 | ||
| 18:27 | Gate6 | ホームポジション(高度20km)復帰の為のスラスタ噴射(ΔV)確認開始
このコマンドを持って通常運用に復帰 |
|
| 時刻未定 | ホームポジション復帰 | ||
3.注目すべき点
降下シーケンスには、Gateと呼ばれる人間が判断をする項目と、「はやぶさ2」が自律判断を行う4つのチェックポイントがある。
人間が判断をするのは、降下前は高度500mまで、降下後は上昇確認からだ。
なぜタッチダウン前後は機体側に自律判断をさせるのかというと、地上で判断してコマンドを送っていたのでは間に合わないからだ。
「はやぶさ2」と地球の通信は片道約20分(往復40分)かかる。判断にかかる時間(20分を想定)まで加えると1時間。この間、機体は高度500mから140mにまで降下する。次の指令は間に合わない。
とりわけ高度45m以下は通信速度が遅いアンテナに切り替わるので、複雑な通信はできず、ビーコンしか取れない。
「はやぶさ2」が自律判断を行うチェックポイントは、それぞれクリア条件が設定されている。1から4に向かい徐々に厳しくなっていき、万一条件を満たさなければすぐに降下を中止し、上昇を始める(緊急離脱:アボート)ようになっている。
それぞれのチェックポイントでのチェック内容は表でも説明したが、クリア条件を記す。
CP1:LIDER(レーザー高度計)からLRF(レーザーレンジファインダ)に、高度計測が正しく引き継がれること
CP2:GCP-NAV誘導でターゲットマーカを正しく捕捉できること
注)GCP-NAVとは、事前観測で得られたリュウグウの表面地形モデルと降下時に探査機が撮影したデータを照合し、現在地を割り出す方法。「地図を手に持ち、目の前の景色で現在地を確かめながら街を歩く」と例えられる。
CP3:ターゲットマーカを視野に入れながら、高度(計画値は8.5m)を保って水平移動ができていること
注)8.5mという高度は、表面になるべく近づきながら、かつターゲットマーカをカメラの視野内に収めながら目標地点まで移動できる、という2つの理由で選定されたとのこと
CP4:静止時に、タッチダウンに問題ないレベルで姿勢が収束したか
津田PMによれば、着陸時に一番懸念されるのが、このチェックポイントで本当に想定通りに動いてくれるかどうかだという。
もちろんチームは事前に何度も検討し、オペレーションの習熟を重ねているのだが、何が潜むのかが分からないのが宇宙の怖さでもある。
通信速度が遅く、またタッチダウン成功を最優先に考えるため、リュウグウからの画像のリアルタイム中継やリアルタイム公開はないということだった。また、採取したサンプルを収める「サンプルコンテナ」には試料が入ったかどうかを検知するセンサがないため「どれ位取れたかは、帰還して開けてみてのお楽しみ」とのこと。
サンプル採取用の弾丸の発射に失敗した「はやぶさ」でもサンプルが取れていたのだから、「はやぶさ2」でも同様であろうと考えているとのことだった。
第2回は誘導制御方式について記す。
続きは以下から
誘導制御方式について記した記事。
・はやぶさ2、いよいよ小惑星リュウグウへタッチダウン(3止)
サンプル採取方法と科学的意義、関係者のコメントについて記した記事
(記事:金木利憲)