前回の記事で述べた通り、第二回は「はやぶさ2」タッチダウン時の誘導制御方式について記す。
1.誘導制御
1-1.「はやぶさ」と「はやぶさ2」の違い
誘導制御は、タッチダウンの成否を分ける重要な要素である。当初は100m四方程度の平原がある想定だったため、「はやぶさ」と同様の方式でタッチダウンする予定だったが、実際にたどり着いた「リュウグウ」は、一様にごつごつした岩に覆われてとてもそのような広さの場所はなかった。そのため運用チームは知恵を絞り、「ピンポイントタッチダウン方式」を採用することにした。
これは例えるなら、似たような景色が続く住宅地を、地形図とGPSを組み合わせて場所を確認して目的の家までたどり着く方式である。
まずはこの、タッチダウン方式の共通点と相違点について、配付資料を基に初代「はやぶさ」と「はやぶさ2」を比べながら述べてゆく。
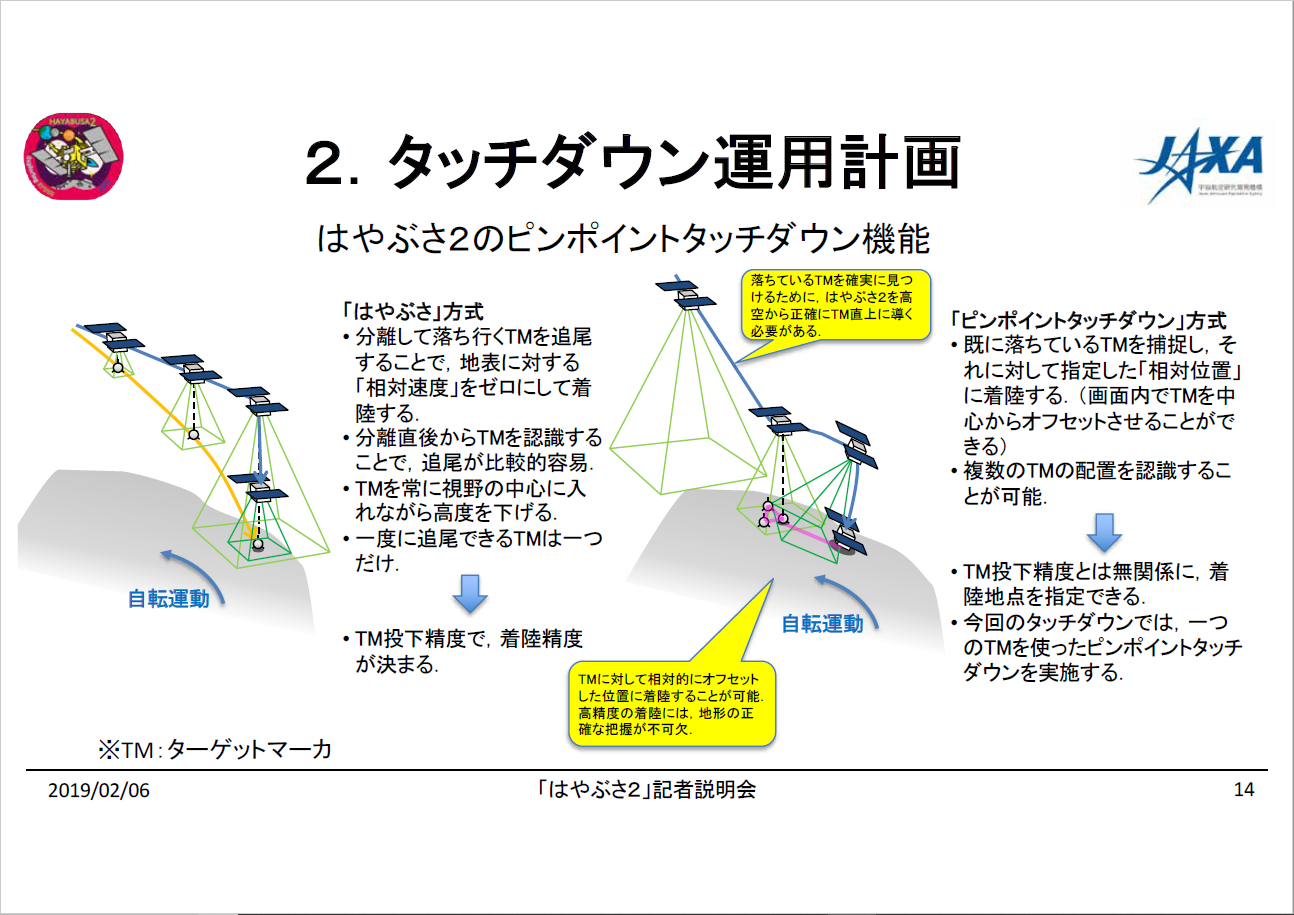
両者の共通点は「ターゲットマーカを目印にタッチダウンする」という点である。
ただし、目印としての使い方が異なる。ここが相違点になる。
・「はやぶさ」方式
分離したターゲットマーカを追尾し続け、追いかけるようにタッチダウンする。常に視野の中心にターゲットマーカを置いて追尾する。この方式の有利な点は、ターゲットマーカを分離直後から追尾し続けるので見失いづらいという点にある。不利な点は、「常に視野の中心に置く」という制限があるので、一度にひとつのマーカしか追尾できず、投下精度がタッチダウンの精度に直結することだ。
・「はやぶさ2」(ピンポイントタッチダウン)方式
先にターゲットマーカを地表に投下し、後にそれを目印に、指定の位置にタッチダウンする。投下時には常に追尾することはせず、タッチダウン時も常に視野の中央に起き続けなくともよい。(「画面内でターゲットマーカがこの位置に来るようなところにタッチダウンしろ」と指示できる)この方式の有利な点は、複数のターゲットマーカを認識できることと、後に着陸位置を指示する際に「あのターゲットマーカを基準にしてこのあたりに着陸しろ」と命令できるので、ターゲットマーカの投下精度が多少悪くとも当初狙った場所に精度良く向かうことができることだ。不利な点は、確率は低いがターゲットマーカを見失ってしまう可能性があることだ。
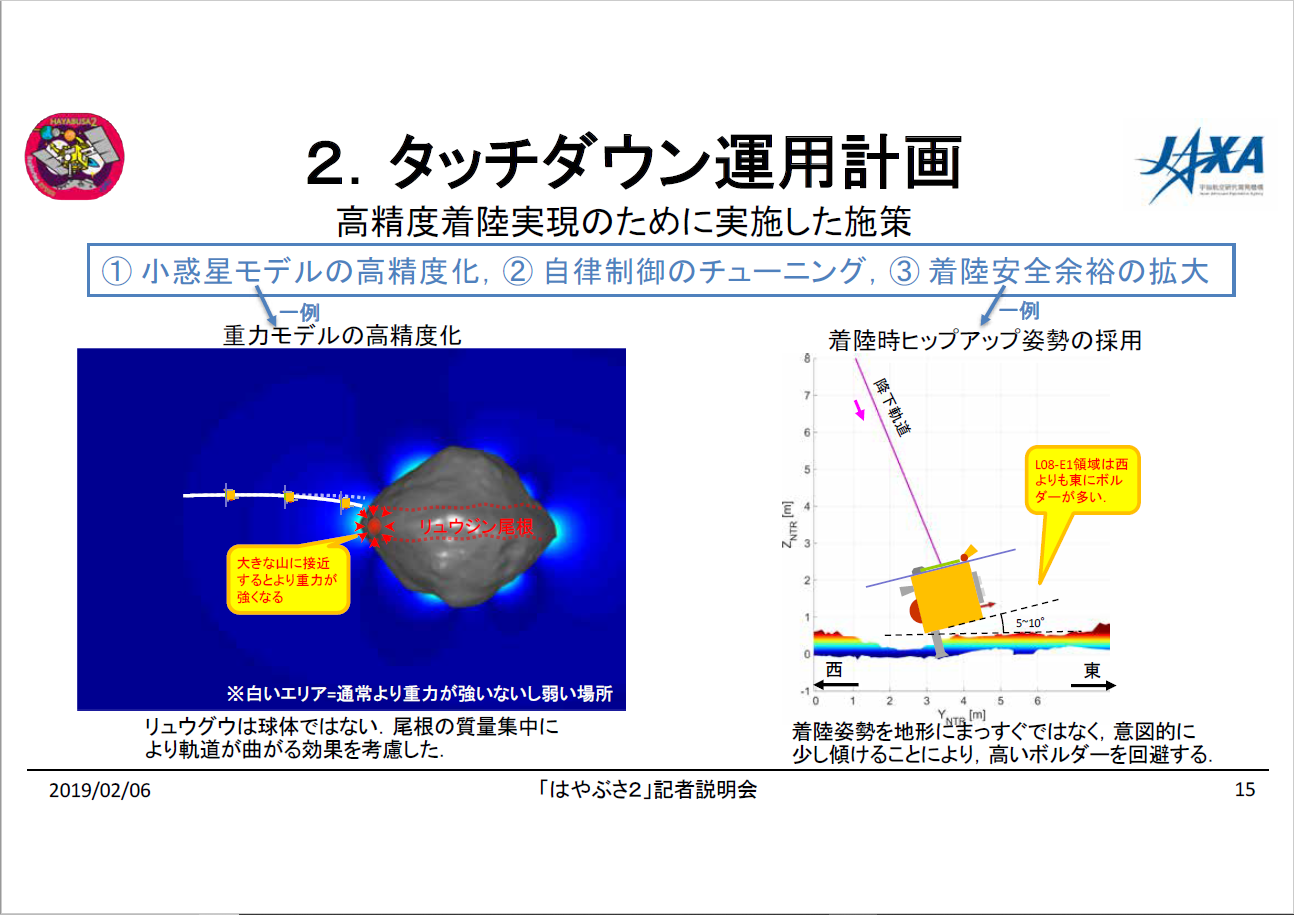
更に、表面の傾きに合わせて少しだけ機体を傾けるようにするなど、安全確実な着陸が出来る確率を上げるために、実現可能な範囲であらゆる工夫を行っている。微少重力天体ではあるがその重力は無視することができず、着陸計画においても重力で軌道が曲がることを厳密に計算して組み込んでいる。
1-2.「はやぶさ2」のタッチダウン手順
「はやぶさ2」は、高度500m時点のデータを元に運用チームが下す最終Go/NoGo判断の後は、自分自身の位置と状況を搭載コンピュータで判断しながら、自力でタッチダウンを行って上昇することになっている。
通信・判断中も高度500mで待機するのではなく、秒速10cmで降下し続けるため、電波の往復と判断時間を含めた1時間の間に高度は140メートルまで下がる。
Go/NoGoは500mのデータで下すが、高度400m時点のデータを元に微修正を入れる可能性もある。この指令がが探査機に届くのは高度45m。ここが通信の間に合うギリギリの時刻で、これ以降はタッチダウンに備えて、通信速度が速いアンテナから遅いアンテナへ切り替えるため、複雑な命令が届かなくなる。
その準備のため、タッチダウンに先立ち、数ヶ月をかけて表面観察とターゲットマーカ投下を行った。
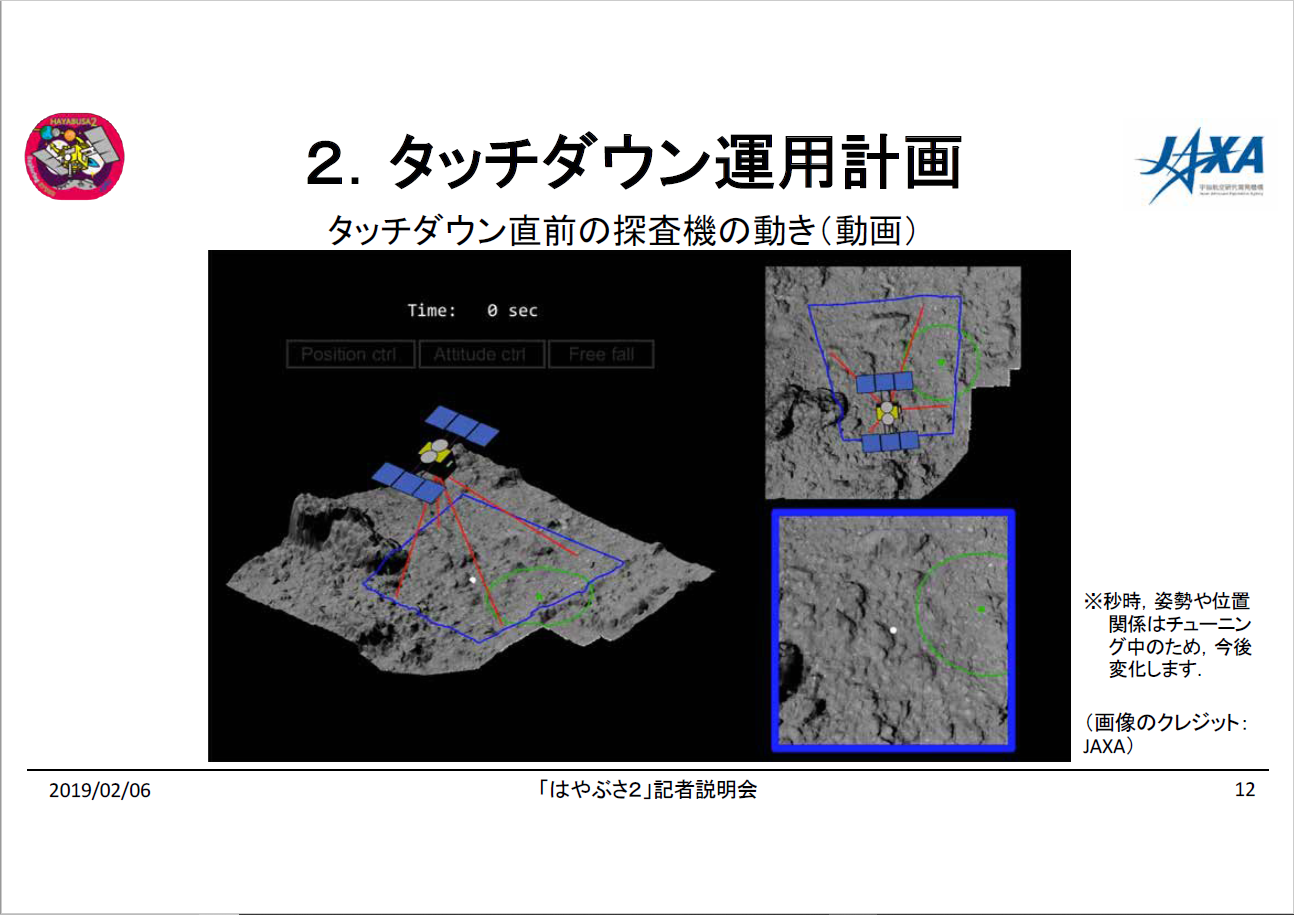
タッチダウン本番では、機体に搭載されたカメラ(ONC)で撮影した画像と、レーザー(遠距離:LIDER/近接:LRF)による高度情報を同時に取得する。この情報を、機体内のコンピュータが計算を行って、これまでの観測を元に事前に用意され送信されたリュウグウ表面の地図とリアルタイムに照らし合わせる。そして「はやぶさ2」は自らの計算で現在地を把握しながらタッチダウンする。途中で問題があった場合は、もちろん即中止して上昇離脱する手筈になっている。
リュウグウに接近するまで使用するLIDERは、25km~0.03km(30m)を測定可能である。接近後に使用するLRFは高度5~40m対応している。今回LIDERからLRFに距離測定を引き継ぐ高度45mというのは、LRFの能力ギリギリといったところだろう。
接近後はターゲットマーカを発見できるかどうかが鍵となる。発見できなければ緊急離脱である。
発見後は、それを視界の中央に置いたまま、8.5mまで高度を下げる。
ターゲットマーカほぼ直上の高度8.5mまで到達すると、この時点で機体を着陸時の姿勢にする。当初は降下しながら地形に合わせて傾けていく予定であったが、今回は着陸可能範囲が狭く、また表面の傾きや岩の位置も充分解っているので、あらかじめ姿勢を決めても問題ない。
姿勢を決めた後は、高度を保って、ターゲットマーカがカメラの視野内の規定位置に来るまで水平移動する。
水平移動が終わったら、その位置で機体の振動が充分収まるのを待つ。
振動が収まったら、斜め下方向に短く一度スラスタを吹き、軽くリュウグウ表面方向に押し出してやる。その後は慣性力と重力によって自由落下し、タッチダウン。同時にリュウグウ表面に向かって弾丸を発射、舞い上がった塵がサンプラホーンを通ってサンプル容器に入る。数秒後にスラスタを噴射し、表面から飛び上がる。
以上がタッチダウン手順である。誘導制御方式以外は初代「はやぶさ」を踏襲している。
2.検討に時間がかかった理由
当初予定では2018年11月中に予定されていた第一回タッチダウンは、2019年2月まで延びた。その理由は、リュウグウの表面が当初想定以上に平地がなく、当初計画をほぼ全て見直さなければならなかったためだった。まずは着陸方式の見直しが必要となり、見直した方式で出せる精度の算出が必要となり、最後に、出せる精度の範囲内で安全に着陸でき、最も科学的に意味のある場所はどこなのかを専門家が話し合って見極めていくことが必要となった。
この検討は日本に限らず、世界中の最前線の研究者が協力して行われた。
最終回となる次回は、サンプル採取方法とその科学的意義、および関係者の意気込みについて書く。
次回の記事
・はやぶさ2、いよいよ小惑星リュウグウへタッチダウン(3止)
サンプル採取方法とその科学的意義、および関係者のコメントについて
前回の記事
タッチダウン地点と当日の時系列、注目ポイント
(記事:金木利憲)


