宇宙航空研究開発機構(JAXA)は25日、月探査機『SLIM』が20日未明に月面着陸した際に取得したデータを公開しました。
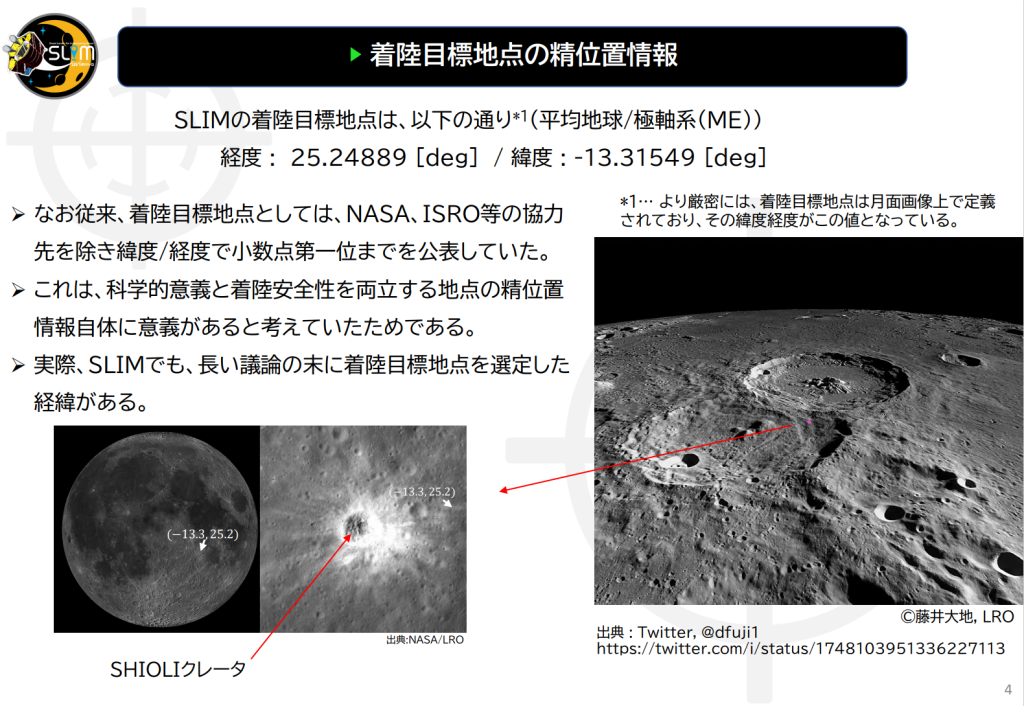
まず着陸位置と精度に関しての報告では、当初の計画どおりの精度を達成できたことが報告されました。
着陸シーケンス中の動作も解析され、高度50mの地点で500Nスラスタが破損し脱落、それにより降下姿勢が乱れ着陸後の姿勢にも影響が出たと説明。仮に破損がなかったとすれば、着陸精度は3~4mとなりまさにピンポイント着陸だったという見解でした。
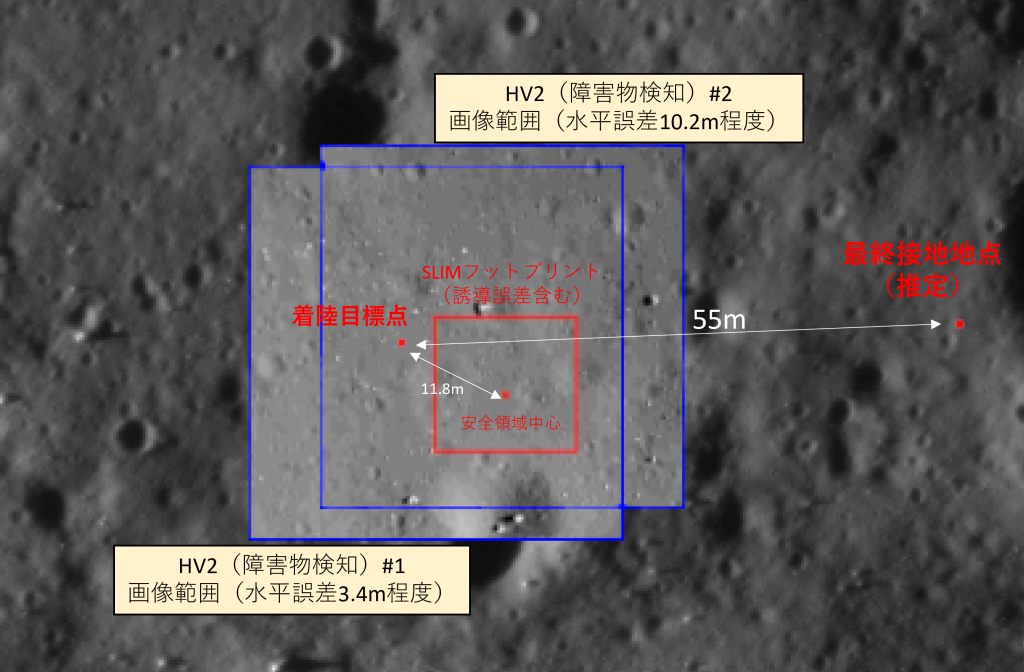
結果としては目標地点から55m離れた位置に着陸したことが推定されるとのこと。これにより目標100m以内というピンポイント着陸は達成できたと判断されました。また、テレメトリから得られた情報をもとに推定着陸姿勢のCGも合わせて公開されました。

テレメトリから想像していたとおり逆立ちに近い形で着陸していると発表されました。ただし、2段階着陸はしていないだろうということから成果については今後精査して判断するとのことです。
着陸後の運用においては、太陽電池からの発電が確認できなかったことから予め用意していた非常時対応手順を実施し、着陸降下中に探査機上で記録された各種データ、画像データについては所定のものは全て取り出すことができたとのこと。バッテリーは過放電による探査機の永久損失を避けるために切り離しを実施し成功しているとのこと。なお、SLIMは太陽電池の発電だけで動作可能のため発電再開すれば観測は行うことができるとの見解も同時に示されました。
着陸後の非常時運用ではマルチバンド分光カメラの観測運用も行われました。
搭載機器の温度上昇によって当初予定の撮影枚数には届かなかったが、取得したから再起動できた場合に行う詳細観測候補を特定することができたとのことです。
LEV-1とLEV-2の成果についても続報がありました。
まず、LEV-1については、SLIMからの切り離しは問題なく行われ予定通りに月面をホッピングにより移動したことをテレメトリで確認できたとのこと。また、完全自立機能や地球との直接通信、および月面ロボット同士の通信や複数台同時の月面運用なども計画どおりに行われたことが確認されました。
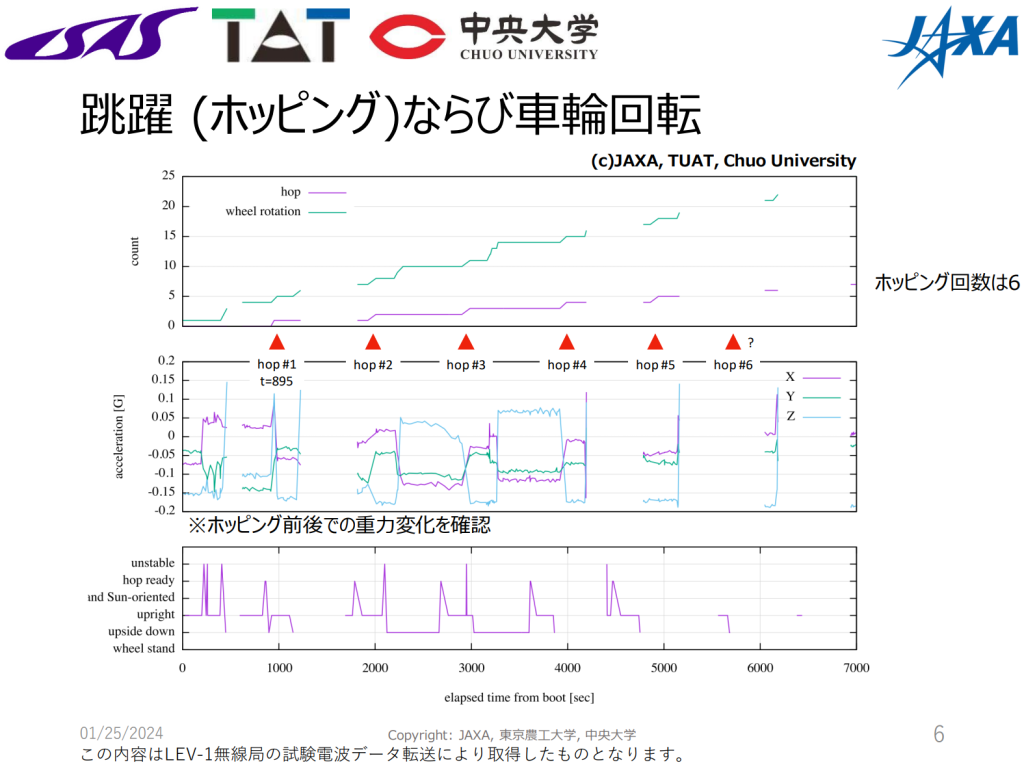
ただし、月面で予定していた撮像は現在未確認とのことで、今後の解析待ちということです。
現在LEV-1は計画通りの月面での活動期間を終えて電力を使い切りまた温度が高い
状態で月面で待機中となっており、太陽方向の変化に伴う太陽電池による発電や温度の低下によっては活動を再開する可能性があるため、引き続きLEV-1からの電波を受信する体制を維持していく予定とのことです。
LEV-2(SORA-Q)も、SLIMからの切り離し、月面への到着は問題なく行われ、撮像にも成功しました。LEV-1を経由してのデータ転送も行われたことによりフルサクセスとなり、世界最小・最軽量の月面探査ロボットとなりました。

LEV-2から送られてきた画像にはSLIMの着陸姿勢が鮮明に捉えられていました。もともと画像処理でSLIMが撮影されている画像を選定してLEV-1へ送信する仕様になっていたため、機能が存分に発揮された結果ともいえます。テレメトリから想定された姿勢が正しかったことが証明されたのも大きな成果でしょう。
短い時間で取得したデータではあるが、解析途中とのことで今後も継続的に情報公開をおこなうとことです。
太陽方向も今後はSLIMの太陽電池に光が当たる方向に移動していくことから電源復帰の可能性もあり、その際も適時対応していくとのことで、まだまだ続報が出てくることでしょう。
(文:岡澤知行)